Este análisis compara dos enfoques opuestos en el desarrollo de vehículos autónomos, ejemplificados por Tesla y Waymo, destacando cómo “ven” el mundo de forma muy distinta en términos de sensores y filosofía tecnológica.
Comparativa de sensores: Tesla vs. Waymo
| Categoría | Tesla | Waymo |
|---|---|---|
| Arquitectura de percepción | Vision-only | Sensor fusion (visión + radar + LiDAR) |
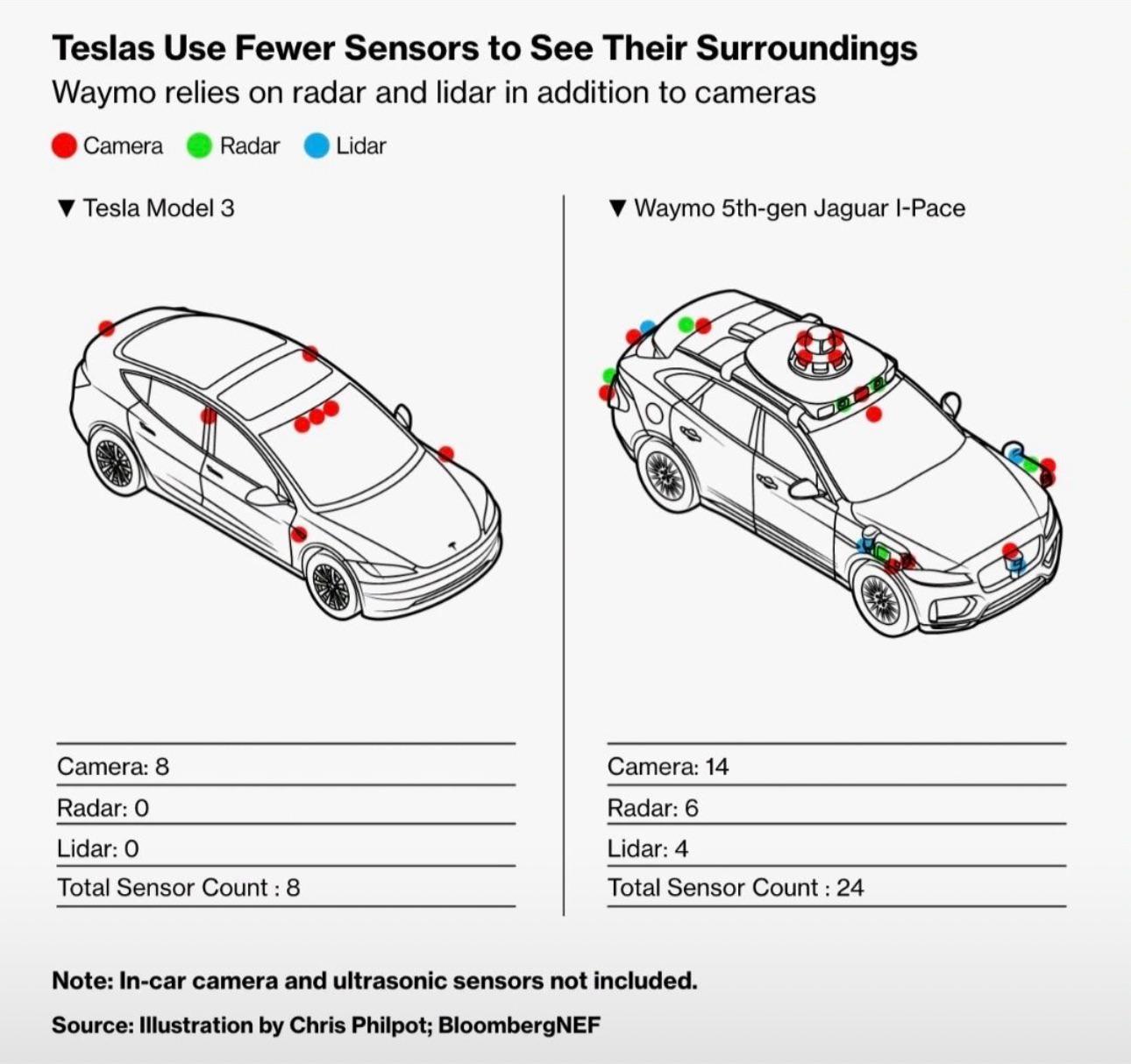
| Número total de sensores | 8 (solo cámaras) | 24 (14 cámaras, 6 radares, 4 LiDARs) |
| LiDAR | ❌ No usa | ✅ Usa múltiples unidades 360º |
| Radar | ❌ Eliminado desde 2022 | ✅ Integrado como capa intermedia |
| Tipo de cámaras | 360º visión con cámaras HD | Cámaras de corto, medio y largo alcance |
| Redundancia sensorial | Baja (solo un tipo de sensor) | Alta (tres tecnologías complementarias) |
| Dependencia del software | Muy alta: la IA debe inferir profundidad, movimiento, obstáculos y contexto solo con imágenes | Equilibrada: percepción reforzada por datos precisos de profundidad y movimiento |
| Procesamiento a bordo | Chip FSD (Full Self Driving), diseñado por Tesla | Arquitectura con CPU, GPU y ASIC de alto rendimiento |
| Actualización de IA | OTA (Over-the-air) con aprendizaje de flota en tiempo real | Centralizado, pero con fuerte simulación y validación antes del despliegue |
| Ventaja principal | Escalabilidad y coste unitario bajo | Precisión, seguridad y robustez en condiciones adversas |
| Desventaja principal | Dificultad para manejar casos límite (nieve, oscuridad, reflejos) solo con visión | Coste elevado, menor escalabilidad industrial inmediata |
Claves de la comparación
1. Minimalismo vs. Redundancia
-
Tesla apuesta por un sistema sólo con cámaras: una arquitectura «vision-only» que depende completamente de la inteligencia artificial.
-
Waymo utiliza una combinación de cámaras, radares y LiDAR, en una estrategia de sensor-fusion para reforzar la fiabilidad en distintos contextos.
2. Costes y escalabilidad
-
El enfoque minimalista de Tesla reduce el coste de materiales y simplifica la producción en masa.
-
Waymo, al integrar más hardware, enfrenta mayores costes, pero ofrece un margen de seguridad más amplio en escenarios complejos.
3. Gestión de casos extremos
-
Waymo puede enfrentarse mejor a condiciones difíciles (noche, lluvia, reflejos) gracias a la redundancia de sensores.
-
Tesla, sin sensores de profundidad, depende de que su software sea capaz de interpretar correctamente el entorno en todos los casos.
4. Requisitos de computación
-
Waymo necesita una gran capacidad de procesamiento a bordo para manejar la enorme cantidad de datos de sus sensores.
-
Tesla utiliza chips propios (FSD) optimizados para eficiencia, y entrena sus modelos con millones de kilómetros en sus flotas mediante actualizaciones remotas.
Ambos caminos tienen méritos y limitaciones. El primero en demostrar fiabilidad real a nivel SAE Nivel 4/5 a escala podría definir el estándar de la industria en la próxima década.



